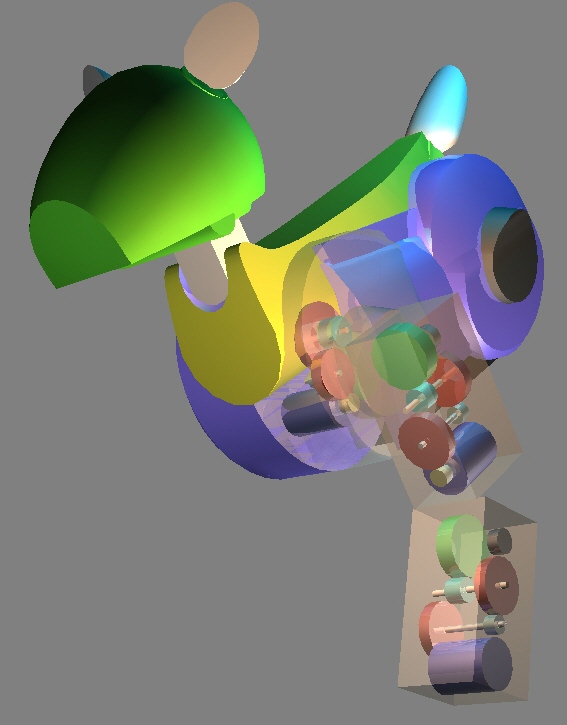
true Space を使用しての作品
某社のロボットに挑戦
注意
あくまで見た目だけで作成しているので、形状にいたる寸法(スケール)は適当です。
あくまでイメージした想像物ということで、観照して下さい。
レンダリングの出力サンプル
|
日付
|
/
|
/
|
/
|
/
|
/
|
/
|
/
|
|
|
画像
|
|
|
|
|
|
|
|
|
|
日付
|
/
|
/
|
/
|
/
|
/
|
/
|
12/16
|
|
|
画像
|
|
|
|
|
|
|

|
|
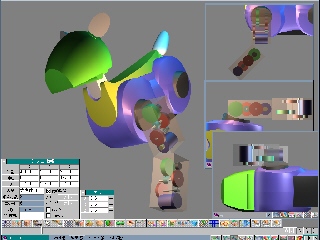
尻尾は、カム方式で上下に動かしている様で、遊びが多い上、
このカム部分の破損がしやすい様である。
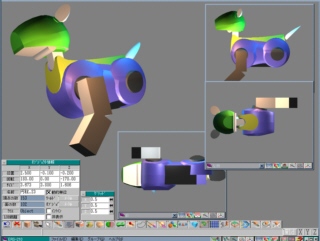
作業画面サンプル(2001/1/17)
|
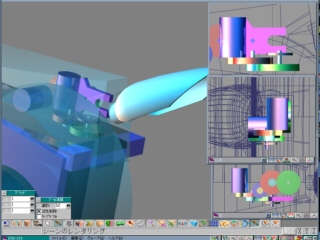
尻尾は、前回のようなデフレンシャル・ギヤで上下左右にするのではなく、
モーターを上下左右に合わせた配置にして、構造を単純化している。
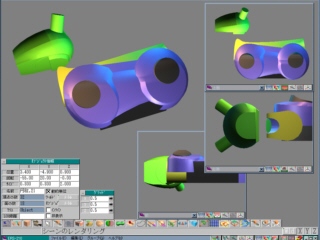
作業画面サンプル(12/17)
|
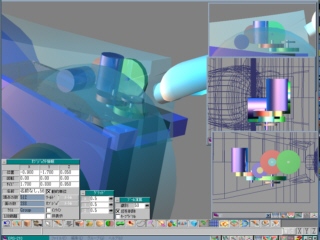
ポテンション・メーターに相当する可変抵抗は、
かなり貧弱なものが使用されているようだ。
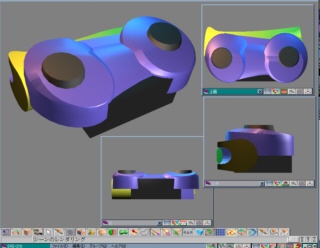
レントゲン撮影画像が公開されたのを期に、本来の内部構造に作業シフト。
作業画面サンプル(12/16)
|
前回のERS-11xに比べ、減速用のギヤ数が1つ減り、
ポテンション・メーターも小型の物が採用されているようだ。
作業画面サンプル(10/18)
|
作業画面サンプル(10/16)
|
作業画面サンプル(10/14)
|
他のページへ
"AIBO"は、もちろん、ソニー(株)の商標です。
このページはソニー(株)と関係無く、hkora11が勝手に作ったものです。